
Research Engineer in Robotics and Computer Vision
I am an experienced C++ Software Engineer with over 8 years of expertise in Humanoid Robotics and Computer Vision.
My work centers on designing, developing, and maintaining advanced, user-friendly control software for complex robotic systems—including humanoids, quadrupeds, and manipulators. I am committed to open science and reproducibility, ensuring that all research outcomes are accessible and verifiable. My current focus is on integrating robust DevOps and build systems to streamline the entire development pipeline, from developer experience to reliable deployment on real-world robotic platforms.
I have contributed as a research engineer at leading institutions, including LIRMM, JRL, and I3S. During my career, I have had the privilege of working under the mentorship ofAbderrahmane Kheddar and Andrew Comport. My efforts have culminated in the development of the mc_rtc robotics framework.
Projects
I have worked on the following 21 projects, and more!
- DARPA Robotic Challenge Finals
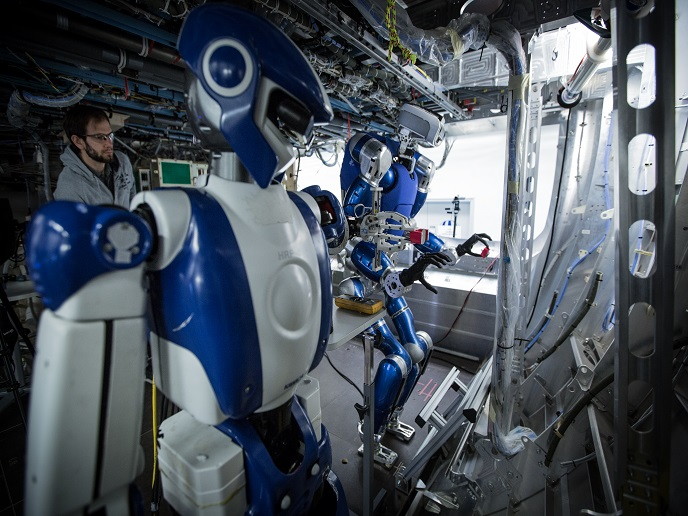
- COMANOID project: large scale aircraft manufacturing in partnership with Airbus
- ANA Avatar XPrize Finals
- Supports 20+ Robots (Humanoids, Manipulators and Quadrupeds)
- Walking, including stair climbing (see https://github.com/jrl-umi3218/lipm_walking_controller)
- Widely used within the research community
- Fully open-source under BSD-2
Roles
- Co-Lead Developper and Maintainer
- Implementation of industrial demonstrators
- Support for PhD and PostDocs (Paper experiments, framework development)
- Integration with robots and sensors
Roles
- Implementation of the whole demo
- Integration of the HRP-5P robot with mc_rtc
Roles
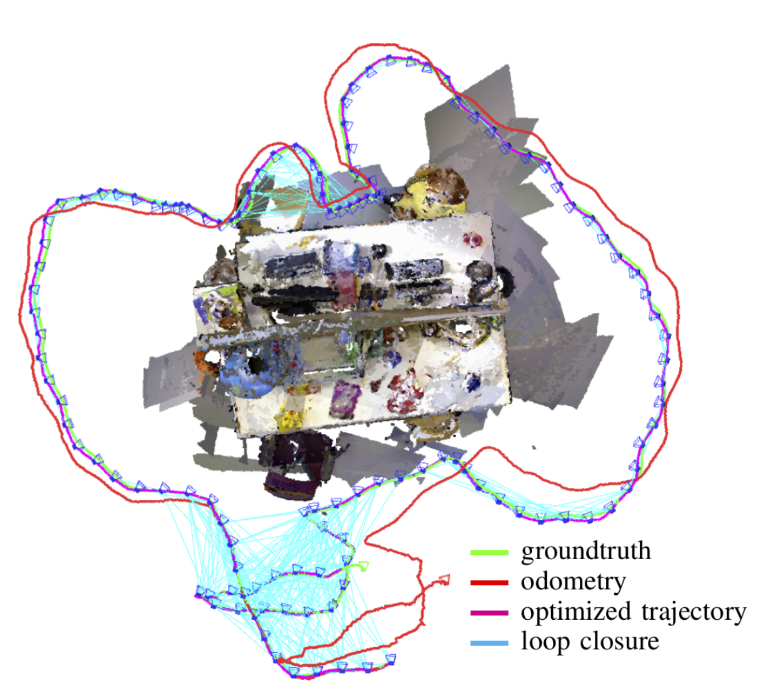
- Integration of Dense Visual SLAM for Localization and Mapping within the Airplane
- Accurate Control of the Humanoid robot based on Visual SLAM
Roles
- Software Engineering for the demonstrator's implementation
- Consulting for the implementation of the Dense Visual Tracker for the Bobbin
- Took part in major worldwide competition lead by US military research agency
- Developed robot-control strategies for disaster response scenarios, designed specifically to emulate the conditions of Fukushima nuclear plant
- Ranked 10 out of 23 leading labs
Roles
- Localization and Mapping
- Object Registration (ICP)

Roles
- Integration of the robot Pepper with mc_rtc
- Help with controller implementation
Roles
- Implemantation of the demonstrator

Roles
- Integrated Siamese Neural Networks into the Caffe deep learning framework
- Trained and evaluated the use of convolutional neural networks to perform place recognition
- Implemented a loop-closure detection algorithm in C++ and Python

Robots
I have worked with the following 16 robots, and more!

HRP-2Kai

HRP-4
HRP-4CR
HRP-5P

Talos

NAO
Pepper
HOAP-3

Sawyer

UR5e
Panda

Bazar

Fetch

Aliengo

Yaskawa HC10DT

FANUC R-1000iA
Work Experience
Robotics Engineer – Humanoid & Underwater Robotics @ LIRMM / University of Montpellier
2025-02-10presentLIRMM, Montpellier, Occitanie, France- Developed and implemented whole-body dynamic balance control algorithms for humanoid robots (in collaboration with Hugo Lefevre).
- Automated the generation of development and deployment environments using CI/CD pipelines, including devcontainers and Docker, to enable reproducible science and seamless demonstrator deployment on real robots.
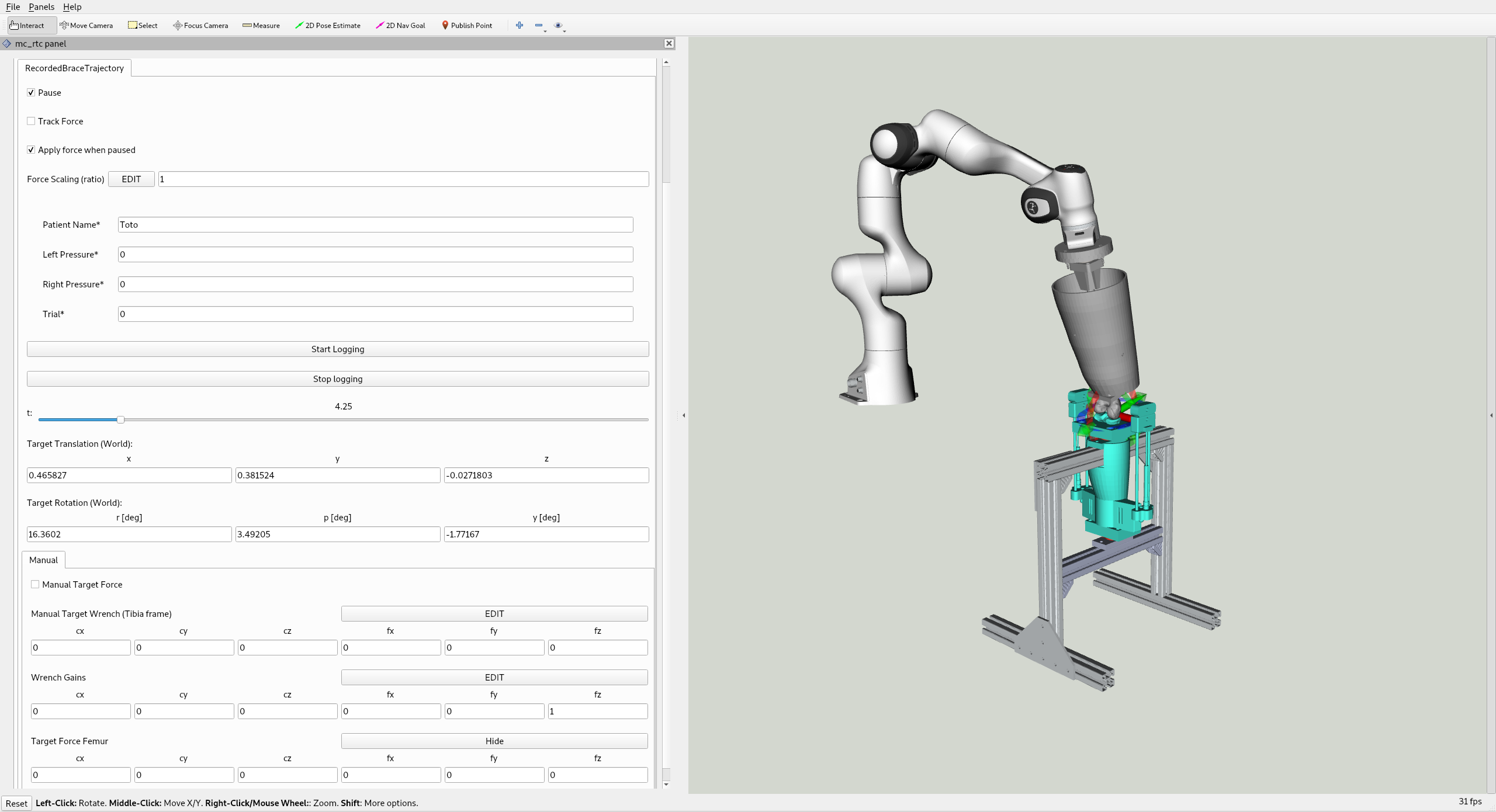
- Project Rolkneematics: designed control software and integrated sensors for capacitive tracking of human prosthesis articulation (knees, hips, shoulders, etc.).
- Nix-based declarative and reproducible build systems
C++HUMANOID ROBOTICSCONTINUOUS INTEGRATIONDEVOPSREPRODUCIBLE SCIENCEMC_RTC FRAMEWORKRobotics Engineer - Humanoid Robotics @ Centre national de la recherche scientifique (CNRS) / LIRMM
2021-10-312024-04-31Montpellier, Occitanie, France- Live robot dance performance on stage at Centre des Arts Enghain-les-Bains
- ANA Avatar XPrize Finalist
- Large-scale loco-manipulation demonstration on-sight for an industrial partner (confidential)
- Industrial project (confidential) - Using a large 7 DoF robot Fanuc R1000IA to unload a containter full of randomly stacked objects
C++HUMANOID ROBOTICSUNITYAUGMENTED REALITYANA AVATAR XPRIZEMC_RTC FRAMEWORKResearch Engineer - Humanoid Robotics @ National Institute of Advanced Industrial Science and Technology (AIST) / Joint Robotics Laboratory (JRL)
2019-11-302021-04-30Tsukuba, Japan- Responsible for the unification of two control frameworks: mc_rtc and HMC
- Assisting students and researchers
- Responsible for experiments and demonstrations on the robots (HRP-5P, HRP-2Kai, Sawyer, Panda, etc)
C++HUMANOID ROBOTICSUNITYAUGMENTED REALITYANA AVATAR XPRIZEMC_RTC FRAMEWORKResearch Engineer in Humanoid Robotics @ Centre national de la recherche scientifique / LIRMM
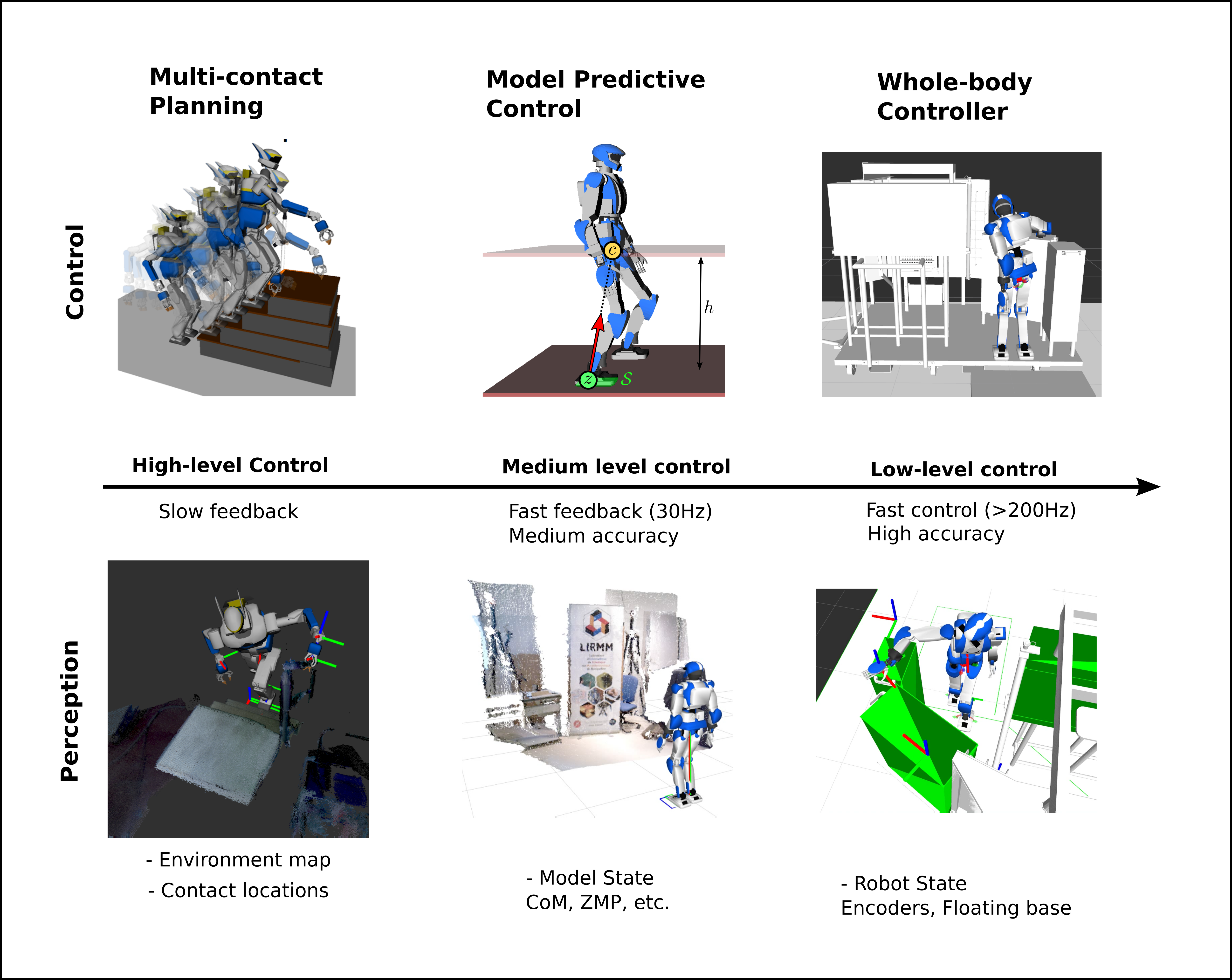
2018-10-312019-11-30Montpellier, France- Responsible for the integration of visual SLAM for robust localisation of the HRP4 Humanoid Robot, notably withing an Airbus aircraft for the final demonstration of the H2020 COMANOID project
- Responsible for the development of all experiments performed on the HR4 at LIRMM
- Integration of new methods and tools within our control framework
C++HUMANOID ROBOTICSSLAMCOMANOID H2020MC_RTC FRAMEWORKPhD in Humanoid Robotics and Computer Vision @ CNRS - Centre national de la recherche scientifique / I3S / LIRMM / AIST-JRL
2014-10-312018-11-30Sophia-Antipolis, France | Tsukuba, Japan | Montpellier, France- Improved robot-environment interactions and reliability with state-of-the-art real-time visual localization and mapping from color and depth images (SLAM)
- Under CNRS contract funded by COMANOID European research project
- Worked in three major international labs: Joint Robotics Laboratory - Tsukuba, Japan ; LIRMM - Montpellier, France ; I3S-CNRS - Sophia-Antipolis, France
- Obtained best paper finalist award at IEEE International Symposium on System Integration for the paper on "Closed-loop RGB-D SLAM Multi-contact Control for Humanoid Robots"
HUMANOID ROBOTICSVISUAL SLAMC++ROSMC_RTC FRAMEWORKHUMANOID ROBOTSOPTIMIZATIONQUADRATIC PROGRAMMINGMODEL PREVIEW CONTROLDARPA Robotics Challenge Finalist @ Defense Advanced Research Projects Agency (DARPA)
2015-06-302015-06-30United States- Took part in major worldwide competition lead by US military research agency
- Developed robot-control strategies for disaster response scenarios, designed specifically to emulate the conditions of Fukushima nuclear plant
- Ranked 10 out of 23 leading labs
INTERNATIONAL COMPETITIONC++ROSSLAMICPHUMANOID ROBOTICSHRP-2Reasearch Internship - Loop-closure detection for SLAM @ Technische Universität München
Place recognition using Convolutional Neural Networks (deep-learning) applied to SLAM Loop-closure detection algorithms.2014-03-312014-09-30MunichC++PYTHONDEEP LEARNINGCONVOLUTIONAL NEURAL NETWORKSCAFFE FRAMEWORKCUDASLAMLOOP-CLOSURE DETECTIONUniversity Projects@ Polytech'Nice-Sophia, Trinity College Dublin
2011-12-312014-12-31Sophia-Antipolis, France- 3D Game Programming (physics and rendering engine)
- Interactive curve-fitting for Scanning Tunnelling Spectroscopy (Atomic Microscope)
- Distributed computing grid exploiting unused smartphone resources
- 3D-Game for visually-disabled players (Project DEVINT)
C++JAVAOPENGL3DGAME DEVELOPMENTCOMPUTER GRAPHICSCOMPUTER SCIENCEResearch Internship - Scanning Tunneling Spectroscopy @ CRANN
Interactive curve-fitting for Scanning Tunneling Spectroscopy (Atomic Microscope)2013-06-302013-08-31Dublin, IrelandC++QTCOMPUTER SCIENCEDevelopement of Fotowall @ High school
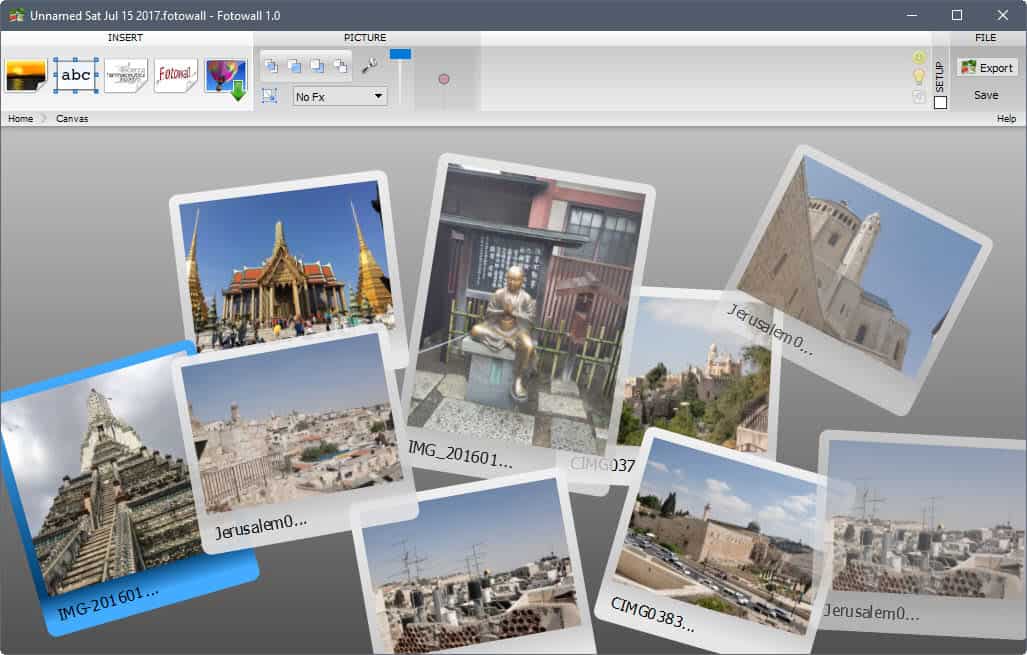
2008-12-312011-12-31France- Developed a popular open-source interactive image manipulation program Fotowall with an Italian partner
- Over 470, 000 downloads (as of December 2011)
C++QTSELF-TAUGHTGITCOLLABORATIVE PROJECTOPEN SOURCE
Education
PhD in Humanoid Robotics and Computer Vision @ Laboratoire d'Informatique et de Robotique de l'Université de Montpellier - I3S Sophia-Antipolis - Joint Robotics Laboratory
2016-10-312019-10-31HUMANOID ROBOTICSVISUAL SLAMC++ROSMC_RTC FRAMEWORKHUMANOID ROBOTSOPTIMIZATIONQUADRATIC PROGRAMMINGMODEL PREVIEW CONTROLSoftware Engineer (Master's degree) @ Polytech'Nice-Sophia
2011-12-312014-12-31COMPUTER VISIONGAME DEVELOPMENTJAVAC++COMPUTER SCIENCEALGORITHMICMATHSLANGUAGESMaster's Degree in Interactive Entertainment Technologies @ Trinity College
2012-12-312013-12-31INTERACTIVE ENTERTAINMENT TECHNOLOGIESClasses Préparatoires aux Grandes Écoles (CPGE MPSI) @ Lycée de Kérichen
2009-12-312011-12-31MATHSPHYSICSENGINEERINGCOMPUTER SCIENCE (FUNCTIONAL PROGRAMMING, ALGORITHMS, COMPLEXITY)LANGUAGESBaccalauréat @ Lycée de l’Harteloire
2002-12-312009-12-31MATHSPHYSICSEARTH AND LIFE SCIENCESLITTERATUREPHYLOSOPHYENGLISHGERMAN